driver.angle
Calculates the angle difference between a rig's current pose and a defined target orientation to dynamically drive rig attributes.
Like its sibling driver.distance, this modifier is a cornerstone for advanced finaling. However, instead of measuring linear proximity, it acts as an angular sensor. It is perfectly suited for joint-based correctives (like sleeve folding, elbow bulging, or skirt raising) where an effect must trigger when a limb bends into a specific cone
of rotation.
Parameters
Understanding the Transforms (The Pivot & The Lever)
The hardest part of this modifier is understanding how the transforms are connected. Unlike driver.distance (which just measures A to B), an angle requires a center of rotation.
- The Pivot (
angle_parent): This is your base reference frame. Think of it as the shoulder or the elbow joint. It defines the "0,0,0" local rotation space. - The Lever (
angle_ref): This is the moving part that swings around the pivot. Think of it as the wrist or the ankle. Mikan draws an imaginary vector from the pivot to this moving part. - The Trigger Pose (
target_angle): This is a specific[x, y, z]rotation relative to the pivot. It represents the exact pose where you want your effect to be at 100%.
The modifier continuously calculates the angle (in degrees) between where the angle_ref currently is, and where the target_angle dictates it should be.
Angle Setup (Inputs)
These parameters define the pivoting system being measured.
| Parameter | Type | Default | Description |
|---|---|---|---|
name | str | Base name for the angle system (e.g., sleeve_fold). | |
angle_ref | node | The moving node driving the current angle (e.g., the wrist). | |
angle_parent | node | The base transform used as the center of rotation (e.g., the elbow). | |
parent | node | ::rig | The node under which the generated technical groups will be parented. |
targets | dict | A dictionary defining the angle rules. Each key is a custom <target_name> (e.g., bend_up) containing both Rules and Outputs. | |
helpers | bool | off | Forces the creation of visual debug locators and cones (automatically on if Mikan is run in debug mode). |
Target Rules
A single angle measurement can drive multiple rules (targets). Inside a specific <target_name> dictionary, these parameters define the mathematical shape of the angular activation cone.
| Option | Type | Default | Description |
|---|---|---|---|
target_angle | list[float] | The exact [x, y, z] local rotation (relative to angle_parent) where the effect is at 100%. | |
falloff | float | The size of the activation cone in degrees. If the current pose is further away from the target than this angle, the effect fades to 0. | |
falloff_tangent | str | linear | Transition curve style: linear (abrupt) or plateau (smooth ease-in/out). |
weight | float / plug | 1.0 | A multiplier for the final value before remapping. Can be a static number or connected to an animatable plug. |
Target Outputs (Remaps & Operations)
Inside each target, you define which attributes are driven and how the 0-1 normalized value is remapped. Also located within the <target_name> dictionary, these parameters dictate how the final values are mathematically applied to the rig.
| Option | Type | Description |
|---|---|---|
remaps | dict | Maps the driven plug to its [min, max] output values. Format: my_node@r.x: [0, 45] |
op / out_operation | str | Global math operation if multiple systems drive the same attribute: add, mult, min, max. Default is absolute override. |
Examples
Sleeve Correctives
A real-world example driving corrective joint rotations on a sleeve when the arm moves up, down, forward, or backward. Notice how one angle system (angle_parent and angle_ref) drives four completely different targets.
driver.angle:
name: sleeve
angle_parent: arm.L::ctrl.elbow
angle_ref: arm.L::ctrl.wrist
targets:
top:
target_angle: [ 0, 0, 74.459 ]
falloff: 35
falloff_tangent: plateau
remaps:
sleeve_top.L::poses.0@t.y: [ 0, -0.18 ]
sleeve_top.L::poses.0@r.z: [ 0, 39.93 ]
op: add
bottom:
target_angle: [ 0, 0, -86.939 ]
falloff: 35
falloff_tangent: plateau
remaps:
sleeve_bot.L::poses.0@t.y: [ 0, -0.31 ]
sleeve_bot.L::poses.0@r.z: [ 0, -48.3 ]
op: add
The Debug Workflow (Helpers)
Just like driver.distance, guessing the correct local Euler rotations and falloff angles without visual feedback is nearly impossible. Use Mikan's Debug mode to construct the system interactively.
Step 1: Draft your YAML
Write your modifier but leave target_angle at [0, 0, 0] and falloff at a dummy number like 45. Set helpers: on.
angle:
name: test
angle_ref: arm.L::ctrls.limb2
angle_parent: arm.L::ctrls.limb1
targets:
target1:
target_angle: [ 0, 0, 0 ] # later
falloff: 50 # later
falloff_tangent: flat
remaps:
out::node@t.x: [ 0, 1 ] # later
op: add
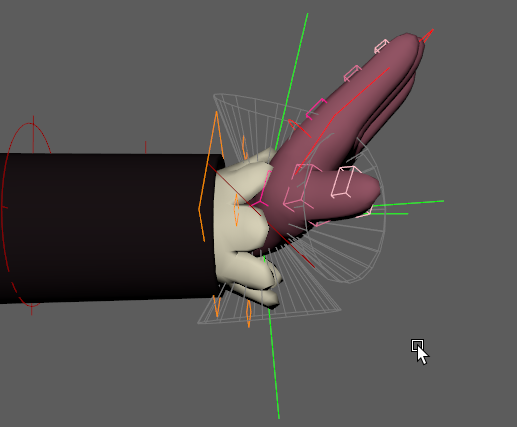
Step 2: Build and Use Visual Locators
When built with helpers, Mikan generates a dedicated visual rig. Rotate your rig into the problem pose, then adjust the generated locators:
🟢 Green Locator (Target Angle): Rotate this locator to match the angle of the moving limb. This defines the center of your activation zone.
📐 Wireframe Cone (Falloff): This visually represents your falloff parameter. The effect is 100% at the center of the cone, and fades to 0% at the edges. Select the Green Locator and adjust its falloff channel to widen or narrow the cone.
Step 3: Copy Values & Rebuild
Once the green locator matches the desired trigger pose and the cone covers the correct area, look at its Channel Box. Copy the rotate X, Y, Z values into your YAML target_angle, and the falloff value into your YAML falloff. Disable helpers and rebuild.
The Math Pipeline (Under the Hood)
To effectively debug this modifier, it helps to understand the exact sequence of mathematical operations it performs, which correspond to the attributes exposed on the Green Debug Locator:
in_angle: The live difference, in degrees, between the current pose (angle_ref) and the recordedtarget_angle.falloff: The maximum allowed angle difference (the radius of the cone).out_normalize: The core calculation. Thein_angleis evaluated against thefalloff.- If
in_angleis0(perfect match), output is1.0. - If
in_angleis greater than or equal tofalloff(outside the cone), output is0.0.
- If
out_weighted: The normalized value is multiplied by theweightparameter.out[i]_min/out[i]_max: These attributes represent the lower and upper limits defined in yourremaps.- Final Output (
<plug>_out): The weighted value is remapped using the min/max limits and sent to the target rig attributes.