driver.distance
Calculates the distance between two points to dynamically drive multiple rig attributes.
This modifier is a cornerstone for advanced finaling. It acts as a proximity sensor: it measures the distance between two nodes and compares it to a recorded Target Distance. As the objects approach this target, the modifier generates a normalized value (0 to 1), remaps it, and drives target attributes (like corrective shapes, fake collisions, squash/stretch setups, or muscle contractions).
The shape of this activation area is controlled by Falloffs, which define how smoothly the effect fades in and out as the objects move around the target.
(For specific activation behaviors like collision spheres or stretch limits, see Common Falloff Strategies. To understand the exact math pipeline and how to build this setup visually from A to Z in Maya, see the Debug Workflow & Under the Hood sections at the bottom of this page).
Parameters
Distance Setup (Inputs)
These parameters define the two points in space being measured.
| Parameter | Type | Default | Description |
|---|---|---|---|
name | str | Base name for the distance system (e.g., skirt_leg_collision). | |
input1 / input2 | node | The two nodes used to calculate the distance. | |
pos1 / pos2 | list[float] | [0, 0, 0] | Optional local offsets for input1 and input2. Allows measuring from a specific point relative to the node. |
parent | node | ::rig | The node under which the generated technical groups will be parented. |
targets | dict | A dictionary defining the distance rules. Each key is a custom <target_name> (e.g., compression) containing both Rules (target_distance, falloffs...) and Outputs (remaps, operations). | |
helpers | bool | off | Forces the creation of visual debug locators (automatically on if Mikan is run in debug mode). |
Target Rules
A single distance measurement can drive multiple rules (targets). Inside a specific <target_name> dictionary, these parameters define the mathematical shape of the distance activation curve.
| Option | Type | Default | Description |
|---|---|---|---|
target_distance | float | The exact distance where the effect is at 100% (its peak). | |
falloff_before | float | The distance before the target where the effect fades to 0. | |
falloff_after | float | The distance after the target where the effect fades to 0. | |
falloff_tangent | str | linear | Transition curve style: linear (abrupt) or plateau (smooth ease-in/out). |
weight | float / plug | 1.0 | A multiplier for the final value before remapping. Can be a static number or connected to an animatable plug (e.g., a collision ON/OFF switch). |
Target Outputs (Remaps & Operations)
Inside each target, you define which attributes are driven and how the 0-1 normalized value is remapped. Also located within the <target_name> dictionary, these parameters dictate how the final values are mathematically applied to the rig.
| Option | Type | Description |
|---|---|---|
remaps | dict | Maps the driven plug to its [min, max] output values. Format: my_node@r.x: [0, 45] |
op / out_operation | str | Global math operation if multiple systems drive the same attribute: add, mult, min, max. |
out_operations | dict | Plug-specific math operations (overrides the global op for specific attributes). |
Examples
Complete Setup (Corrective Shape)
A real-world production example driving corrective joint rotations on a skirt when the leg gets too close to it.
driver.distance:
name: skirt_N
input1: leg.L::skin.bj2
input2: skirt_base::skin.0
pos2: [ 0.868, 0.163, 4.861 ] # Offset the measurement point
targets:
compression:
target_distance: 3.853
falloff_before: 0 # Stays at 100% if closer than 3.853
falloff_after: 1.276 # Fades to 0 when distance reaches 5.129
falloff_tangent: plateau
remaps:
skirt_front.L::poses.0@r.x: [ 0, -73.32 ]
skirt_side.L::poses.0@r.z: [ 0, 37.95 ]
op: add
The Debug Workflow (Helpers)
It is extremely difficult to guess the correct target_distance and falloff values without testing them visually on the rig. Mikan includes a built-in Debug mode for this exact purpose.
Step 1: Draft your YAML
Write your modifier but leave the distance and falloff values at dummy numbers (e.g., 0). Set helpers: on (or build your template in Debug Mode).
distance:
name: test
input1: A::node
input2: B::node
pos1: [ 0, 0, 0 ] # later
pos2: [ 0, 0, 0 ] # later
parent: A::node
targets:
target1:
target_distance: 1 # later
falloff_before: 1 # later
falloff_after: 1 # later
falloff_tangent: plateau
remaps:
out::node@t.x: [ 0, 1 ] # later
op: add
Step 2: Build and Use Visual Locators
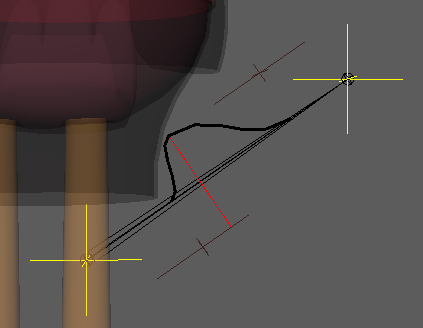
When built with helpers, Mikan generates a dedicated visual rig in the viewport for this modifier. Pose your character, then manipulate the generated locators to visually sculpt the math curve:
🟡 Yellow Locators (Inputs): Represent the actual measurement points. Position them where you want the distance to be calculated. Copy their coordinates into pos1 / pos2.
🔴 Red Locator (Target): Represents the target_distance. Slide it along the axis to define where the effect should peak.
🟤 Brown Locators (Falloffs): Define the falloff_before and falloff_after. Slide them to widen or narrow the activation zone.
Step 3: Copy Values & Rebuild
Once the visual locators give you the exact behavior you want in the viewport, look at the Red Target Locator's Channel Box. It exposes the raw calculated values (target_distance, falloff_before, falloff_after, out_min, out_max).
Copy these values back into your YAML file, disable helpers, and rebuild the rig for production.
The Math Pipeline (Under the Hood)
To effectively use and debug this modifier, it is crucial to understand the exact sequence of mathematical operations it performs. When testing on the rig, these steps correspond exactly to the attributes exposed on the debug locators:
in_distance: The live, current distance between your two input points.target_distance: The exact distance recorded by the rigger where the effect should be at its maximum.delta_distance: The difference between thein_distanceand thetarget_distance. (As the objects get closer to the target distance, this delta approaches 0).out_normalize: The core calculation. The delta is evaluated against thefalloff_beforeandfalloff_afterzones to generate a normalized 0.0 to 1.0 value.1.0means the inputs are exactly at the target distance.0.0means the inputs are completely outside the falloff zones.
out_weighted: The normalized value is multiplied by theweightparameter (useful for on/off switches).out[i]_min/out[i]_max: These attributes represent the lower and upper limits defined in yourremapsdictionary for each driven plug.- Final Output (
<plug>_out): Theout_weightedvalue is finally remapped using the min/max limits and sent directly to the target rig attributes.
Common Falloff Strategies
Depending on how you configure the falloff_before and falloff_after values, you can create three completely different activation behaviors:
- The Strict Peak (Trigger only at a specific point):
Set both
falloff_beforeandfalloff_afterto values> 0. The effect will smoothly fade in as the objects approach the target distance, peak at 100%, and fade out as they continue moving past it. - The Collision Sphere (Trigger when closer than target):
Set
falloff_before: 0andfalloff_after: > 0. If the objects get closer to each other than the target distance, the effect hits an infinite plateau and stays locked at 100%. It only fades out to 0 as they separate beyond the target. (Ideal for clothing intersections). - The Escape Limit (Trigger when further than target):
Set
falloff_before: > 0andfalloff_after: 0. The effect peaks when objects reach the target distance and stays locked at 100% no matter how far away they get. It only fades out if they get closer than the target. (Ideal for stretch limits).