rig.spline
Spline IK/FK rig module with twist, stretch, and volume control
Overview
rig.spline builds a hybrid IK/FK rig along a spline, supporting twist, soft volume preservation, and flexible skin joint creation. A good understanding of template chain configuration is crucial to constructing an effective rig.
How It Works
-
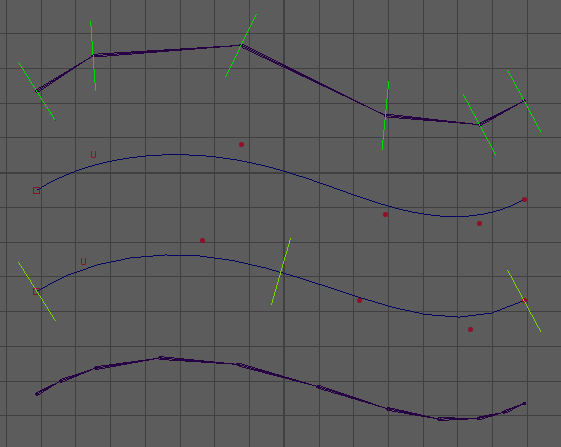
FK Chain:
- Built similarly to
core.bonesexcept the last joint is also a controller. - Each FK joint corresponds to a control vertex (CV) of the FK spline.
- FK controllers directly deform this base spline.
- Built similarly to
-
IK Controllers:
- A number of IK controllers are distributed along the FK spline.
- The start and end controllers are placed at the beginning and end of the spline; others are spaced in between.
- These IK controllers deform a second curve that is reconstructed and skinned from the FK spline.
- The second curve contains 2× the number of IK controllers in control vertices.
- Each IK controller affects two CVs, allowing axis scale to influence tangent behavior.
-
Skin Joints:
- Created along the second IK spline.
- Count and placement are configurable.
⚠️ If too many FK controllers are used relative to IK controllers, the rebuilt curve may lack the detail to accurately follow the original FK spline.
Template Parameters
numbers(int): Number of joints to create in the chain.root(float3): Position of the first joint relative to parent.transform(float3): Relative offset applied to each subsequent joint.
Options
iks(int, min:2, default:3): Number of IK controllers. Final IK spline will have 2× this number in control vertices.tweakers(enum, default:off): Adds secondary animation controllers per skin joint.off: No tweakers.chained: Tweakers follow a hierarchy.unchained: Tweakers remain independent.
bones(int, default:0): Number of skin joints to create. Defaults to2× FK controllers - 1if unspecified.bone_length(enum, default:cvs): Distribution mode for skin joints.parametric: Evenly spaced along the spline parameter.cvs: Based on FK controller CV positions.equal: Joints evenly spaced by length.
uniform_ik(bool, default:on): IK controller distribution mode.on: Parametric placement.off: Uniform length spacing.
fk_easing(enum, default:off): FK influence smoothing mode.off: Each FK controller controls a single CV.in: First controller affects first two CVs.out: Last controller affects last two CVs.in-out: Combinesinandouteasing.
default_stretch(bool, default:off): Enables stretch behavior by default.
Rig Hierarchy Options (from core.bones)
do_pose(bool, default:off): Adds a pose node above the controller.add_nodes(str | list[str]): Adds custom nodes in the hierarchy.
parent_scale(bool, default:off): Enables scale propagation between controllers.flip_orient(bool, default:off): Flips controller root orientation for symmetry.
Orientation Controls
rotate_order(enum, default:auto): Controller rotate order.⚠️ Avoid changing unless necessary.
orient(enum, default:auto): Orientation mode.auto: Automatically computed (recommended).copy: Copy orientation from template.
aim(str, default:y): Main axis aligned toward next joint.up(str, default:z): Secondary axis aligned usingup_dir.up_dir(enum, default:auto): Up vector calculation method.auto: Based on chain geometry.+x,-x,+y,-y,+z,-z: Scene-based up vectors.
up_auto(enum, default:average): Up vector smoothing mode forautomode.average: Average of triangle normals.each: Up vector calculated per joint.first: Uses first triangle’s up vector for all.last: Uses last triangle’s up vector for all.